Iterative reconstruction¶
[22]:
import numpy as np
import cupy as cp
import dxchange
import matplotlib.pyplot as plt
from holotomocupy.holo import G, GT
from holotomocupy.magnification import M, MT
from holotomocupy.shift import S, ST, registration_shift
from holotomocupy.chunking import gpu_batch
from holotomocupy.recon_methods import CTFPurePhase, multiPaganin
from holotomocupy.proc import dai_yuan, linear
import holotomocupy.chunking as chunking
%matplotlib inline
chunking.global_chunk = 1
[ ]:
# Init data sizes and parametes of the PXM of ID16A
[23]:
n = 1024 # object size in each dimension
ntheta = 1 # number of angles (rotations)
center = n/2 # rotation axis
# ID16a setup
ndist = 4
detector_pixelsize = 3e-6
energy = 33.35 # [keV] xray energy
wavelength = 1.2398419840550367e-09/energy # [m] wave length
focusToDetectorDistance = 1.28 # [m]
sx0 = 3.7e-4
z1 = np.array([4.584e-3, 4.765e-3, 5.488e-3, 6.9895e-3])[:ndist]-sx0
z2 = focusToDetectorDistance-z1
distances = (z1*z2)/focusToDetectorDistance
magnifications = focusToDetectorDistance/z1
voxelsize = detector_pixelsize/magnifications[0]*2048/n # object voxel size
norm_magnifications = magnifications/magnifications[0]
# scaled propagation distances due to magnified probes
distances = distances*norm_magnifications**2
z1p = z1[0] # positions of the probe for reconstruction
z2p = z1-np.tile(z1p, len(z1))
# magnification when propagating from the probe plane to the detector
magnifications2 = (z1p+z2p)/z1p
# propagation distances after switching from the point source wave to plane wave,
distances2 = (z1p*z2p)/(z1p+z2p)
norm_magnifications2 = magnifications2/(z1p/z1[0]) # normalized magnifications
# scaled propagation distances due to magnified probes
distances2 = distances2*norm_magnifications2**2
distances2 = distances2*(z1p/z1)**2
# allow padding if there are shifts of the probe
pad = n//16
# sample size after demagnification
ne = int(np.ceil((n+2*pad)/norm_magnifications[-1]/8))*8 # make multiple of 8
[ ]:
## Read data
[24]:
data00 = np.zeros([ntheta, ndist, n, n], dtype='float32')
ref00 = np.zeros([1, ndist, n, n], dtype='float32')
for k in range(ndist):
data00[:, k] = dxchange.read_tiff(f'data/data_{n}_{k}.tiff')[:ntheta]
ref00[:, k] = dxchange.read_tiff(f'data/ref_{n}_{k}.tiff')
shifts_drift_init = np.load('data/shifts_drift.npy')[:ntheta, :ndist]
shifts_ref_init = np.load('data/shifts_ref.npy')[:ntheta, :ndist]
shifts_ref0_init = np.load('data/shifts_ref0.npy')[:, :ndist]
shifts_init = shifts_drift_init
[ ]:
# Find shifts of reference images
[25]:
shifts_ref0 = np.zeros([1, ndist, 2], dtype='float32')
for k in range(ndist):
shifts_ref0[:, k] = registration_shift(ref00[:, k], ref00[:, 0], upsample_factor=1000)
print(f'Found shifts: \n{shifts_ref0=}')
print(f'Correct shifts: \n{shifts_ref0_init=}')
shifts_ref = np.zeros([ntheta, ndist, 2], dtype='float32')
for k in range(ndist):
im = np.tile(ref00[0, 0], [ntheta, 1, 1])
shifts_ref[:, k] = registration_shift(data00[:, k], im, upsample_factor=1000)
print(f'Found shifts: \n{shifts_ref=}')
print(f'Correct shifts: \n{shifts_ref_init=}')
Found shifts:
shifts_ref0=array([[[ 0. , 0. ],
[-1.202, 1.42 ],
[-0.572, 1.013],
[-0.803, 1.528]]], dtype=float32)
Correct shifts:
shifts_ref0_init=array([[[ 0. , 0. ],
[-1.2042098 , 1.4274013 ],
[-0.5933894 , 1.0185907 ],
[-0.81615317, 1.5357459 ]]], dtype=float32)
Found shifts:
shifts_ref=array([[[ 1.623, -0.705],
[-1.638, -0.78 ],
[-1.545, 1.318],
[-1.804, 0.486]]], dtype=float32)
Correct shifts:
shifts_ref_init=array([[[ 1.6345956 , -0.7230556 ],
[-1.6381626 , -0.7971997 ],
[-1.5440626 , 1.3147254 ],
[-1.8124148 , 0.50514865]]], dtype=float32)
[ ]:
### Assuming the shifts are calculated, shifts refs back
[26]:
data0 = data00.copy()
ref0 = ref00.copy()
# shifted refs for correction
for k in range(ndist):
# shift refs back
ref0[:, k] = ST(ref0[:, k].astype('complex64'), shifts_ref0[:, k]).real
ref0c = np.tile(np.array(ref0), (ntheta, 1, 1, 1))
for k in range(ndist):
# shift refs the position where they were when collecting data
ref0c[:, k] = S(ref0c[:, k].astype('complex64'), shifts_ref[:, k]).real
[27]:
rdata = data0/ref0c
[28]:
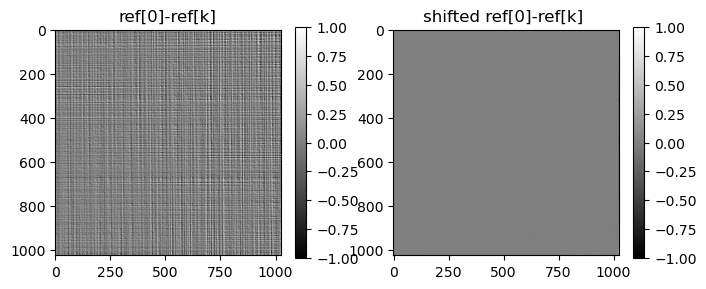
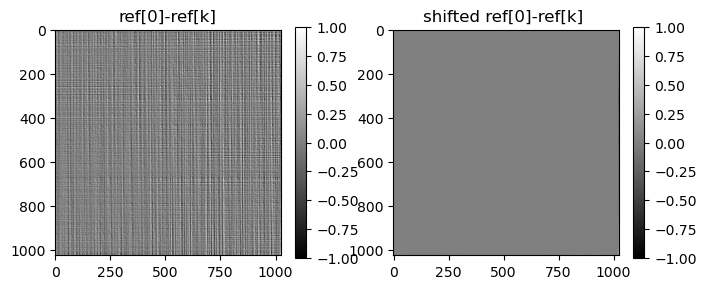
for k in range(4):
fig, axs = plt.subplots(1, 2, figsize=(8, 3))
im = axs[0].imshow(ref00[0, 0]-ref00[0, k], cmap='gray',vmax=1,vmin=-1)
axs[0].set_title('ref[0]-ref[k]')
fig.colorbar(im)
# ,vmin=-500,vmax=500)
im = axs[1].imshow(ref0[0, 0]-ref0[0, k], cmap='gray',vmax=1,vmin=-1)
axs[1].set_title('shifted ref[0]-ref[k] ')
fig.colorbar(im)


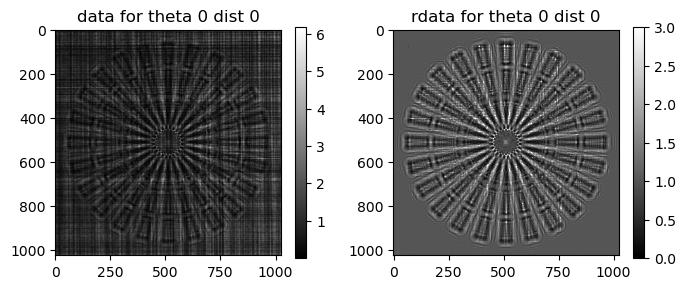
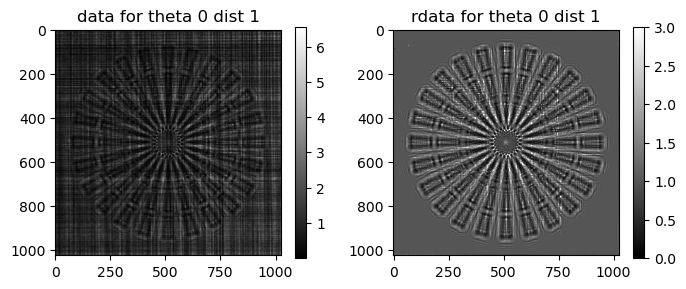
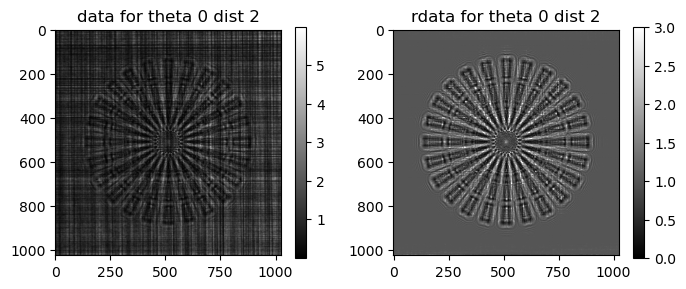
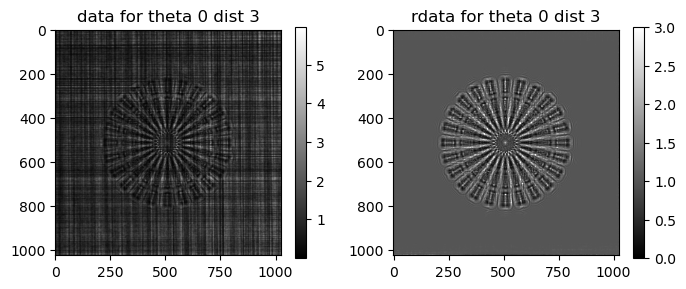
[29]:
for k in range(ndist):
fig, axs = plt.subplots(1, 2, figsize=(8, 3))
im=axs[0].imshow(data0[-1,k],cmap='gray')#,vmin = 0.5,vmax=2 )
axs[0].set_title(f'data for theta {ntheta-1} dist {k}')
fig.colorbar(im)
im=axs[1].imshow(rdata[-1,k],cmap='gray',vmin = 0,vmax=3)
axs[1].set_title(f'rdata for theta {ntheta-1} dist {k}')
fig.colorbar(im)
[ ]:
### Scale images
[30]:
rdata_scaled = rdata.copy()
for k in range(ndist):
rdata_scaled[:, k] = M(rdata_scaled[:, k], 1/norm_magnifications[k], n).real
for k in range(ndist):
fig, axs = plt.subplots(1, 3, figsize=(12, 3))
im = axs[0].imshow(rdata_scaled[0, 0], cmap='gray', vmin=0, vmax=3)
axs[0].set_title(f'shifted rdata_scaled for theta 0 dist {k}')
fig.colorbar(im)
im = axs[1].imshow(rdata_scaled[0, k], cmap='gray', vmin=0, vmax=3)
axs[1].set_title(f'shifted rdata_scaled for theta {ntheta-1} dist {k}')
fig.colorbar(im)
im = axs[2].imshow(rdata_scaled[0, k]-rdata_scaled[0, 0], cmap='gray', vmin=-1, vmax=1)
axs[2].set_title(f'difference')
fig.colorbar(im)
[ ]:
### Align images between different planes
[ ]:
#### Approach 1. Align data
[31]:
# shifts_drift = np.zeros([ntheta,ndist,2],dtype='float32')
# for k in range(1,ndist):
# shifts_drift[:,k] = registration_shift(rdata_scaled[:,k],rdata_scaled[:,0],upsample_factor=1000)
# # note shifts_drift should be after magnification.
# shifts_drift*=norm_magnifications[np.newaxis,:,np.newaxis]
# shifts_drift_median = shifts_drift.copy()
# shifts_drift_median[:] = np.median(shifts_drift,axis=0)
# print(shifts_drift_median[0],shifts_drift_init[0])
# for k in range(ndist):
# fig, axs = plt.subplots(1, 2, figsize=(10, 3))
# im=axs[0].plot(shifts_drift[:,k,0],'.')
# im=axs[0].plot(shifts_drift_median[:,k,0],'.')
# im=axs[0].plot(shifts_drift_init[:,k,0],'r.')
# axs[0].set_title(f'distance {k}, shifts y')
# im=axs[1].plot(shifts_drift[:,k,1],'.')
# im=axs[1].plot(shifts_drift_median[:,k,1],'.')
# im=axs[1].plot(shifts_drift_init[:,k,1],'r.')
# axs[1].set_title(f'distance {k}, shifts x')
# # plt.show()
[ ]:
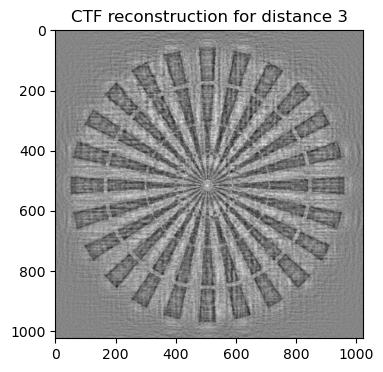
#### Approach 2. Align CTF reconstructions from 1 distance
[32]:
recCTF_1dist = np.zeros([ntheta, ndist, n, n], dtype='float32')
distances_ctf = (distances/norm_magnifications**2)[:ndist]
for k in range(ndist):
recCTF_1dist[:, k] = CTFPurePhase(
rdata_scaled[:, k:k+1], distances_ctf[k:k+1], wavelength, voxelsize, 1e-1)
plt.figure(figsize=(4, 4))
plt.title(f'CTF reconstruction for distance {ndist-1}')
plt.imshow(recCTF_1dist[0, -1], cmap='gray')
plt.show()
shifts_drift = np.zeros([ntheta, ndist, 2], dtype='float32')
for k in range(1, ndist):
shifts_drift[:, k] = registration_shift(
recCTF_1dist[:, k], recCTF_1dist[:, 0], upsample_factor=1000)
# note shifts_drift should be after magnification.
shifts_drift *= norm_magnifications[np.newaxis, :, np.newaxis]
print(f'Found shifts: \n{shifts_drift=}')
print(f'Correct shifts: \n{shifts_drift_init=}')
Found shifts:
shifts_drift=array([[[ 0. , 0. ],
[ 0.5743313 , 0.28860387],
[-1.2976288 , 1.4960606 ],
[ 2.3344269 , -3.4822235 ]]], dtype=float32)
Correct shifts:
shifts_drift_init=array([[[ 0. , 0. ],
[ 0.6, 0.3],
[-1.3, 1.5],
[ 2.3, -3.5]]], dtype=float32)
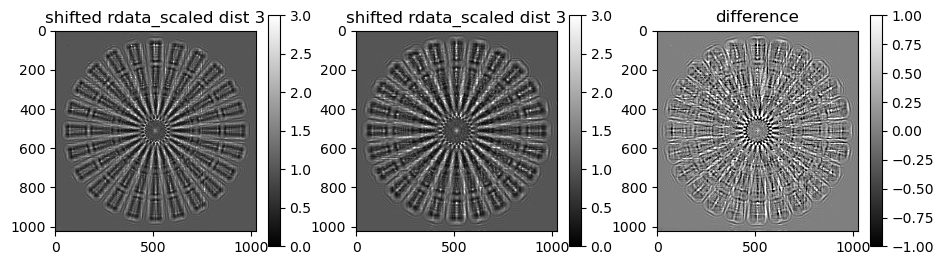
[33]:
rdata_scaled_aligned = rdata_scaled.copy()
for k in range(ndist):
rdata_scaled_aligned[:, k] = ST(rdata_scaled[:, k], shifts_drift[:, k]/norm_magnifications[k]).real
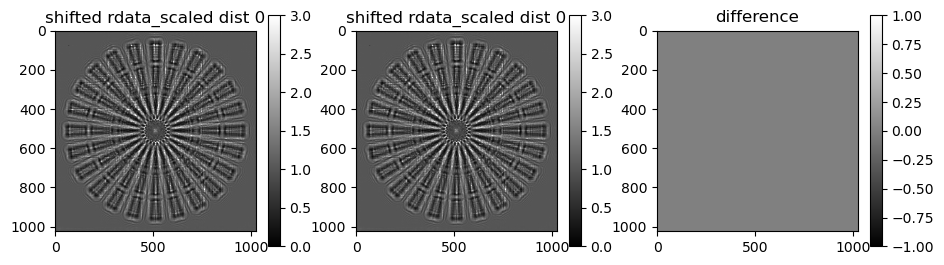
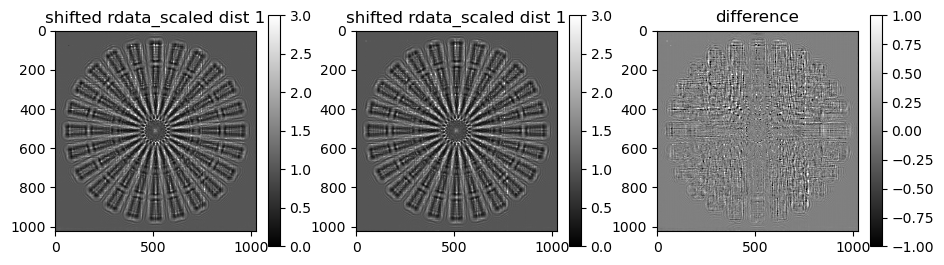
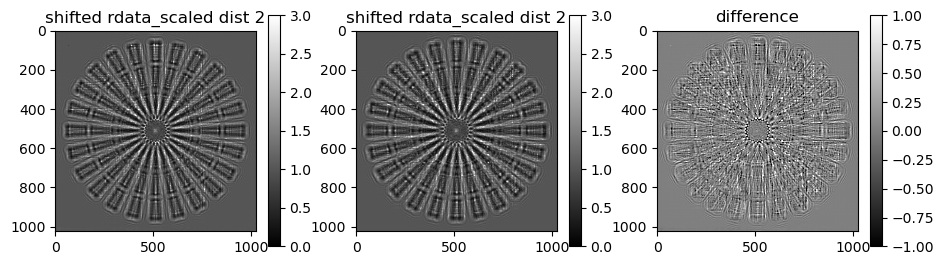
for k in range(ndist):
fig, axs = plt.subplots(1, 3, figsize=(11, 3))
im = axs[0].imshow(rdata_scaled_aligned[0, 0], cmap='gray', vmin=0, vmax=3)
axs[0].set_title(f'shifted rdata_scaled dist {k}')
fig.colorbar(im)
im = axs[1].imshow(rdata_scaled_aligned[0, k], cmap='gray', vmin=0, vmax=3)
axs[1].set_title(f'shifted rdata_scaled dist {k}')
fig.colorbar(im)
im = axs[2].imshow(rdata_scaled_aligned[0, k] - rdata_scaled_aligned[0, 0], cmap='gray', vmin=-1, vmax=1)
axs[2].set_title(f'difference')
fig.colorbar(im)
[ ]:
#### set global shifts to drift shifts
[34]:
shifts = shifts_drift
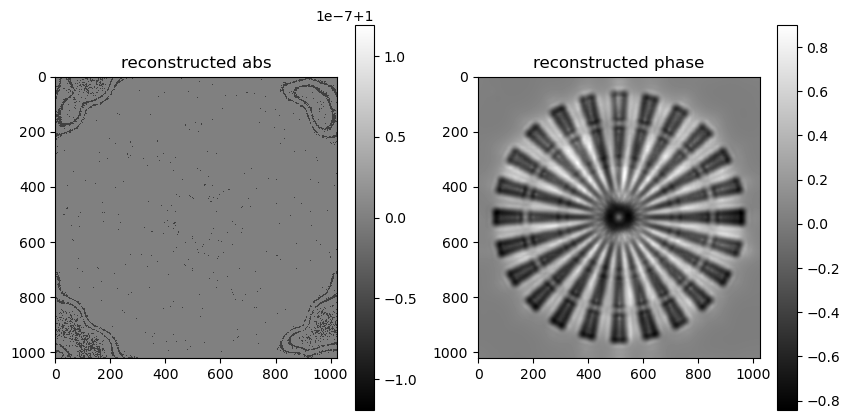
[35]:
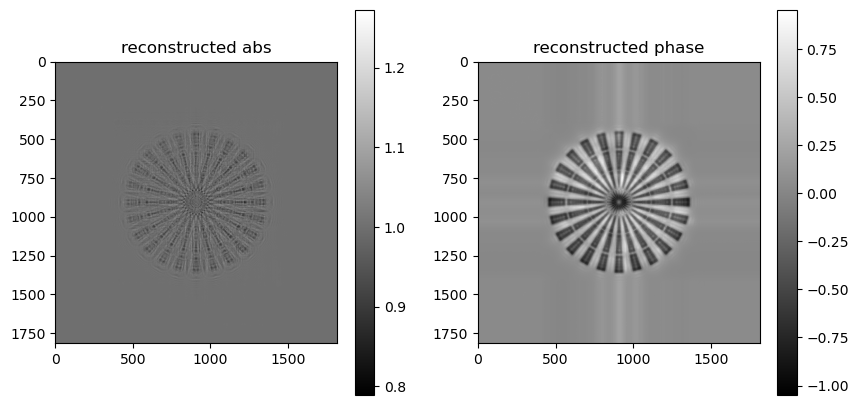
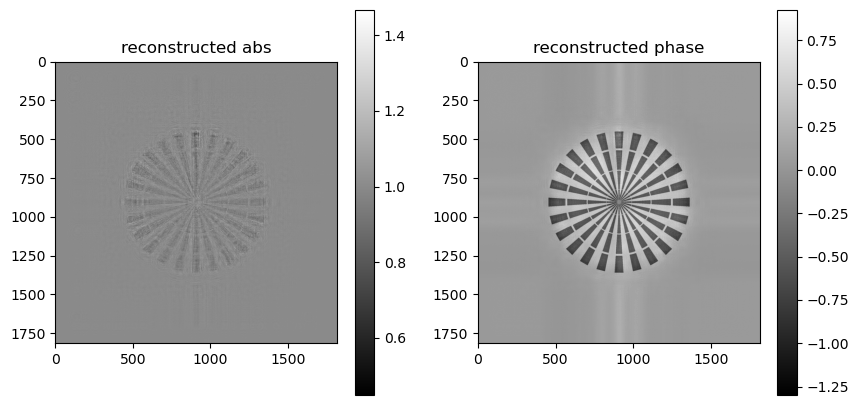
def mshow(a):
if isinstance(a,cp.ndarray):
a=a.get()
fig, axs = plt.subplots(1, 2, figsize=(10, 5))
im = axs[0].imshow(np.abs(a), cmap='gray')
axs[0].set_title('reconstructed abs')
fig.colorbar(im)
im = axs[1].imshow(np.angle(a), cmap='gray')
axs[1].set_title('reconstructed phase')
fig.colorbar(im)
plt.show()
[36]:
# distances should not be normalized
distances_pag = (distances/norm_magnifications**2)[:ndist]
recMultiPaganin = np.exp(1j*multiPaganin(rdata_scaled_aligned,
distances_pag, wavelength, voxelsize, 19, 1e-12))
mshow(recMultiPaganin[0])
# dxchange.write_tiff(np.angle(recMultiPaganin), f'data/rec/MultiPaganin.tiff', overwrite=True)
[ ]:
# Construct operators
[ ]:
#### Forward holo: $d=\mathcal{G}_{z_j}\left((\mathcal{G}_{z_j'}\mathcal{S}_{s'_{kj}}q)\mathcal{M}_j\mathcal{S}_{s_{kj}}\psi_k\right)$,
#### Adjoint holo: $\psi=\sum_j\mathcal{S}^H_{s_j}\mathcal{M}_j^H\left((\mathcal{G}_{z_j'}\mathcal{S}_{s'_{kj}}q)^*\mathcal{G}^H_{z_j}d\right)$,
#### Adjoint holo wrt probe: $q=\sum_{j,k}\mathcal{S}_{s_{kj}'}\mathcal{G}_{z_j'}^H\left((\mathcal{M}_j\mathcal{S}_{s_{kj}}\psi_k)^*\mathcal{G}^H_{z_j}d\right)$
[37]:
@gpu_batch
def _fwd_holo(psi, shifts_ref, shifts, prb):
prb = cp.array(prb)
shifts_ref = cp.array(shifts_ref)
shifts = cp.array(shifts)
data = cp.zeros([psi.shape[0], ndist, n, n], dtype='complex64')
for i in range(ndist):
# ill shift for each acquisition
prbr = cp.tile(prb, [psi.shape[0], 1, 1])
prbr = S(prbr, shifts_ref[:, i])
# propagate illumination
prbr = G(prbr, wavelength, voxelsize, distances2[i])
# object shift for each acquisition
psir = S(psi, shifts[:, i]/norm_magnifications[i])
# scale object
if ne != n:
psir = M(psir, norm_magnifications[i]*ne/(n+2*pad), n+2*pad)
# multiply the ill and object
psir *= prbr
# propagate both
psir = G(psir, wavelength, voxelsize, distances[i])
data[:, i] = psir[:, pad:n+pad, pad:n+pad]
return data
def fwd_holo(psi, prb):
return _fwd_holo(psi, shifts_ref, shifts, prb)
@gpu_batch
def _adj_holo(data, shifts_ref, shifts, prb):
prb = cp.array(prb)
shifts_ref = cp.array(shifts_ref)
shifts = cp.array(shifts)
psi = cp.zeros([data.shape[0], ne, ne], dtype='complex64')
for j in range(ndist):
psir = cp.pad(data[:, j], ((0, 0), (pad, pad), (pad, pad)))
# propagate data back
psir = GT(psir, wavelength, voxelsize, distances[j])
# ill shift for each acquisition
prbr = cp.tile(prb, [data.shape[0], 1, 1])
prbr = S(prbr, shifts_ref[:, j])
# propagate illumination
prbr = G(prbr, wavelength, voxelsize, distances2[j])
# multiply the conj ill and object
psir *= cp.conj(prbr)
# scale object
if ne != n:
psir = MT(psir, norm_magnifications[j]*ne/(n+2*pad), ne)
# object shift for each acquisition
psi += ST(psir, shifts[:, j]/norm_magnifications[j])
return psi
def adj_holo(data, prb):
return _adj_holo(data, shifts_ref, shifts, prb)
@gpu_batch
def _adj_holo_prb(data, shifts_ref, shifts, psi):
prb = cp.zeros([data.shape[0], n+2*pad, n+2*pad], dtype='complex64')
for j in range(ndist):
prbr = np.pad(data[:, j], ((0, 0), (pad, pad), (pad, pad)))
psir = psi.copy()
# propagate data back
prbr = GT(prbr, wavelength, voxelsize, distances[j])
# object shift for each acquisition
psir = S(psir, shifts[:, j]/norm_magnifications[j])
# scale object
psir = M(psir, norm_magnifications[j]*ne/(n+2*pad), n+2*pad)
# multiply the conj object and ill
prbr *= cp.conj(psir)
# propagate illumination
prbr = GT(prbr, wavelength, voxelsize, distances2[j])
# ill shift for each acquisition
prbr = ST(prbr, shifts_ref[:, j])
prb += prbr
return prb
def adj_holo_prb(data, psi):
''' Adjoint Holography operator '''
return np.sum(_adj_holo_prb(data, shifts_ref, shifts, psi), axis=0)[np.newaxis]
# adjoint test
data = data0.copy()
ref = ref0.copy()
arr1 = np.pad(np.array(data[:, 0]+1j*data[:, 0]).astype('complex64'),
((0, 0), (ne//2-n//2, ne//2-n//2), (ne//2-n//2, ne//2-n//2)), 'symmetric')
prb1 = np.array(ref[0, :1]+1j*ref[0, :1]).astype('complex64')
prb1 = np.pad(prb1, ((0, 0), (pad, pad), (pad, pad)))
arr2 = fwd_holo(arr1, prb1)
arr3 = adj_holo(arr2, prb1)
arr4 = adj_holo_prb(arr2, arr1)
print(f'{np.sum(arr1*np.conj(arr3))}==\n{np.sum(arr2*np.conj(arr2))}')
print(f'{np.sum(prb1*np.conj(arr4))}==\n{np.sum(arr2*np.conj(arr2))}')
(38691564+12.822029113769531j)==
(38691572-6.904126348672435e-05j)
(38691488+6.1875j)==
(38691572-6.904126348672435e-05j)
[ ]:
#### Forward holo without sample: $d=\mathcal{G}_{z_j}\mathcal{S}_{s'_{j}}q$,
#### Adjoint holo without sample: $q=\sum_j\mathcal{S}^H_{s'_{j}}\mathcal{G}^H_{z_j}d$
[38]:
@gpu_batch
def _fwd_holo0(prb, shifts_ref0):
data = cp.zeros([1, ndist, n, n], dtype='complex64')
shifts_ref0 = cp.array(shifts_ref0)
for j in range(ndist):
# ill shift for each acquisition
prbr = S(prb, shifts_ref0[:, j])
# propagate illumination
data[:, j] = G(prbr, wavelength, voxelsize, distances[0])[:, pad:n+pad, pad:n+pad]
return data
def fwd_holo0(prb):
return _fwd_holo0(prb, shifts_ref0)
@gpu_batch
def _adj_holo0(data, shifts_ref0):
prb = cp.zeros([1, n+2*pad, n+2*pad], dtype='complex64')
shifts_ref0 = cp.array(shifts_ref0)
for j in range(ndist):
# ill shift for each acquisition
prbr = cp.pad(data[:, j], ((0, 0), (pad, pad), (pad, pad)))
# propagate illumination
prbr = GT(prbr, wavelength, voxelsize, distances[0])
# ill shift for each acquisition
prb += ST(prbr, shifts_ref0[:, j])
return prb
def adj_holo0(data):
return _adj_holo0(data, shifts_ref0)
# adjoint test
data = data0[0, :].copy()
ref = ref0.copy()
prb1 = np.array(ref[0, :1]+1j*ref[0, :1]).astype('complex64')
prb1 = np.pad(prb1, ((0, 0), (pad, pad), (pad, pad)))
arr2 = fwd_holo0(prb1)
arr3 = adj_holo0(arr2)
print(f'{np.sum(prb1*np.conj(arr3))}==\n{np.sum(arr2*np.conj(arr2))}')
(11117684-1.5390625j)==
(11117705-5.558638440561481e-05j)
[ ]:
#### Approximate the probe by solving the L2-norm minimization problem for reference images
[39]:
def line_search(minf, gamma, fu, fd):
""" Line search for the step sizes gamma"""
while (minf(fu)-minf(fu+gamma*fd) < 0 and gamma > 1e-12):
gamma *= 0.5
if (gamma <= 1e-12): # direction not found
# print('no direction')
gamma = 0
return gamma
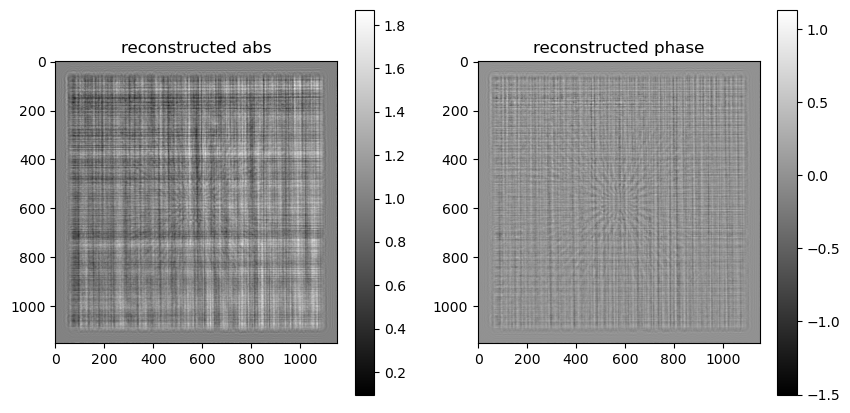
def cg_holo(ref, init_prb, pars):
"""Conjugate gradients method for holography"""
# minimization functional
def minf(fprb):
f = np.linalg.norm(np.abs(fprb)-ref)**2
return f
ref = np.sqrt(ref)
prb = init_prb.copy()
for i in range(pars['niter']):
fprb0 = fwd_holo0(prb)
gradprb = adj_holo0(fprb0-ref*np.exp(1j*np.angle(fprb0)))
if i == 0:
dprb = -gradprb
else:
dprb = dai_yuan(dprb,gradprb,gradprb0)
gradprb0 = gradprb
# line search
fdprb0 = fwd_holo0(dprb)
gammaprb = line_search(minf, pars['gammaprb'], fprb0, fdprb0)
prb = prb + gammaprb*dprb
if i % pars['err_step'] == 0:
fprb0 = fwd_holo0(prb)
err = minf(fprb0)
print(f'{i}) {gammaprb=}, {err=:1.5e}')
if i % pars['vis_step'] == 0:
mshow(prb[0])
return prb
rec_prb0 = np.ones([1, n+2*pad, n+2*pad], dtype='complex64')
ref = ref00.copy()
pars = {'niter': 17, 'err_step': 1, 'vis_step': 16, 'gammaprb': 0.5}
rec_prb0 = cg_holo(ref, rec_prb0, pars)
0) gammaprb=0.5, err=2.11298e+05
1) gammaprb=0.5, err=2.24406e+04
2) gammaprb=0.5, err=9.08483e+03
3) gammaprb=0.25, err=3.70211e+03
4) gammaprb=0.25, err=2.17992e+03
5) gammaprb=0.5, err=2.17583e+03
6) gammaprb=0.5, err=1.65217e+03
7) gammaprb=0.5, err=1.53926e+03
8) gammaprb=0.5, err=1.32050e+03
9) gammaprb=0.5, err=1.27246e+03
10) gammaprb=0.5, err=1.17870e+03
11) gammaprb=0.25, err=9.26656e+02
12) gammaprb=0.25, err=9.02601e+02
13) gammaprb=0.25, err=7.54923e+02
14) gammaprb=0.125, err=6.62421e+02
15) gammaprb=0.125, err=6.02119e+02
16) gammaprb=0.125, err=5.57155e+02
[ ]:
#### Main reconstruction. $\ \sum_k\sum_j||\mathcal{G}_{z_j}((\mathcal{G}_{z'_j}S_{s'_{kj}}q)(M_j S_{s_{kj}}\psi_k))|-\sqrt{d_{kj}}\|^2_2 + \||\mathcal{G}_{z_0}S_{s^r_j}q|-\sqrt{d^r}\|_2^2\to \text{min}_{\psi_k,q}$
[40]:
def line_search(minf, gamma, fu, fu0, fd, fd0):
""" Line search for the step sizes gamma"""
while (minf(fu, fu0)-minf(fu+gamma*fd, fu0+gamma*fd0) < 0 and gamma >= 1/64):
gamma *= 0.5
if (gamma < 1/64): # direction not found
# print('no direction')
gamma = 0
return gamma
@gpu_batch
def _gradient(psi, data, shifts_ref, shifts, prb):
prb = cp.array(prb)
shifts_ref = cp.array(shifts_ref)
shifts = cp.array(shifts)
res = cp.zeros([psi.shape[0], ne, ne], dtype='complex64')
fpsires = cp.zeros([psi.shape[0], ndist, n, n], dtype='complex64')
for j in range(ndist):
# ill shift for each acquisition
prbr = cp.tile(prb, [psi.shape[0], 1, 1])
prbr = S(prbr, shifts_ref[:, j])
# propagate illumination
prbr = G(prbr, wavelength, voxelsize, distances2[j])
# object shift for each acquisition
psir = S(psi, shifts[:, j]/norm_magnifications[j])
# scale object
if ne != n:
psir = M(psir, norm_magnifications[j]*ne/(n+2*pad), n+2*pad)
# multiply the ill and object
psir *= prbr
# propagate both
psir = G(psir, wavelength, voxelsize, distances[j])
fpsi = psir[:, pad:n+pad, pad:n+pad]
fpsires[:, j] = fpsi
###########################
psir = fpsi-data[:, j]*np.exp(1j*(np.angle(fpsi)))
psir = cp.pad(psir, ((0, 0), (pad, pad), (pad, pad)))
# propagate data back
psir = GT(psir, wavelength, voxelsize, distances[j])
# ill shift for each acquisition
prbr = cp.tile(prb, [psi.shape[0], 1, 1])
prbr = S(prbr, shifts_ref[:, j])
# propagate illumination
prbr = G(prbr, wavelength, voxelsize, distances2[j])
# multiply the conj ill and object
psir *= cp.conj(prbr)
# scale object
if ne != n:
psir = MT(psir, norm_magnifications[j]*ne/(n+2*pad), ne)
# object shift for each acquisition
res += ST(psir, shifts[:, j]/norm_magnifications[j])
# probe normalization
res /= cp.amax(cp.abs(prb))**2
return [res, fpsires]
def gradient(psi, data, prb):
''' Gradient wrt psi'''
return _gradient(psi, data, shifts_ref, shifts, prb)
@gpu_batch
def _gradientprb(psi, data, shifts_ref, shifts, prb):
prb = cp.array(prb)
shifts_ref = cp.array(shifts_ref)
shifts = cp.array(shifts)
res = cp.zeros([psi.shape[0], n+2*pad, n+2*pad], dtype='complex64')
fpsires = cp.zeros([psi.shape[0], ndist, n, n], dtype='complex64')
for j in range(ndist):
# ill shift for each acquisition
prbr = cp.tile(prb, [psi.shape[0], 1, 1])
prbr = S(prbr, shifts_ref[:, j])
# propagate illumination
prbr = G(prbr, wavelength, voxelsize, distances2[j])
# object shift for each acquisition
psir = S(psi, shifts[:, j]/norm_magnifications[j])
# scale object
if ne != n:
psir = M(psir, norm_magnifications[j]*ne/(n+2*pad), n+2*pad)
# multiply the ill and object
psir *= prbr
# propagate both
psir = G(psir, wavelength, voxelsize, distances[j])
fpsi = psir[:, pad:n+pad, pad:n+pad]
fpsires[:, j] = fpsi
###########################
fpsi = fpsi-data[:, j]*np.exp(1j*(np.angle(fpsi)))
prbr = np.pad(fpsi, ((0, 0), (pad, pad), (pad, pad)))
psir = psi.copy()
# propagate data back
prbr = GT(prbr, wavelength, voxelsize, distances[j])
# object shift for each acquisition
psir = S(psir, shifts[:, j]/norm_magnifications[j])
# scale object
psir = M(psir, norm_magnifications[j]*ne/(n+2*pad), n+2*pad)
# multiply the conj object and ill
prbr *= cp.conj(psir)
# propagate illumination
prbr = GT(prbr, wavelength, voxelsize, distances2[j])
# ill shift for each acquisition
prbr = ST(prbr, shifts_ref[:, j])
res += prbr
return [res, fpsires]
def gradientprb(psi, data, prb):
''' Gradient wrt prb'''
[gradprb, fprb] = _gradientprb(psi, data, shifts_ref, shifts, prb)
gradprb = np.sum(gradprb, axis=0)[np.newaxis]
return [gradprb, fprb]
def cg_holo(data, ref, init, init_prb, pars):
"""Conjugate gradients method for holography"""
# minimization functional
def minf(fpsi, fprb):
f = np.linalg.norm(np.abs(fpsi)-data)**2
if isinstance(fprb, np.ndarray) or isinstance(fprb, cp.ndarray):
f += np.linalg.norm(np.abs(fprb)-ref)**2
return f
data = np.sqrt(data)
ref = np.sqrt(ref)
psi = init.copy()
prb = init_prb.copy()
conv = np.zeros(1+pars['niter']//pars['err_step'])
for i in range(pars['niter']):
if pars['upd_psi']:
[grad, fpsi] = gradient(psi, data, prb)
# Dai-Yuan direction
if i == 0:
d = -grad
else:
d = dai_yuan(d,grad,grad0)
grad0 = grad
fd = fwd_holo(d, prb)
gammapsi = line_search(minf, pars['gammapsi'], fpsi, 0, fd, 0)
psi = linear(psi,d,1,gammapsi)
if pars['upd_prb']:
[gradprb, fprb] = gradientprb(psi, data, prb)
fprb0 = fwd_holo0(prb)
gradprb += adj_holo0(fprb0-ref*np.exp(1j*np.angle(fprb0)))
gradprb *= 1/(ntheta+1)
# Dai-Yuan direction
if i == 0:
dprb = -gradprb
else:
dprb = dai_yuan(dprb,gradprb,gradprb0)
gradprb0 = gradprb
# line search
fdprb = fwd_holo(psi, dprb)
fdprb0 = fwd_holo0(dprb)
gammaprb = line_search(
minf, pars['gammaprb'], fprb, fprb0, fdprb, fdprb0)
prb = prb + gammaprb*dprb
if i % pars['err_step'] == 0:
fprb = fwd_holo(psi, prb)
fprb0 = fwd_holo0(prb)
err = minf(fprb, fprb0)
conv[i//pars['err_step']] = err
print(f'{i}) {gammapsi=} {gammaprb=}, {err=:1.5e}')
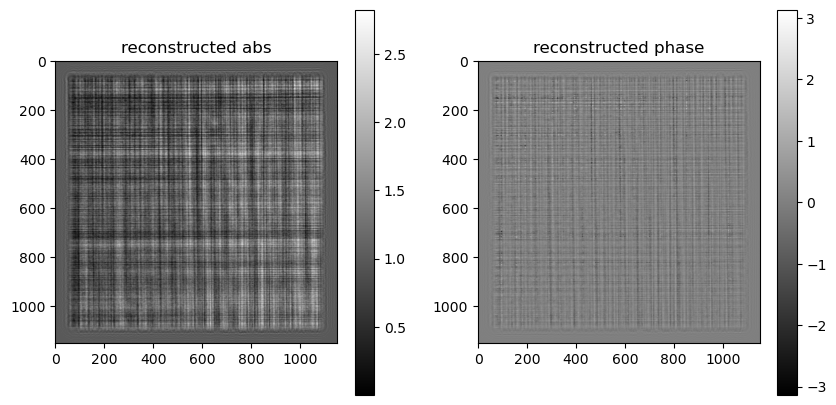
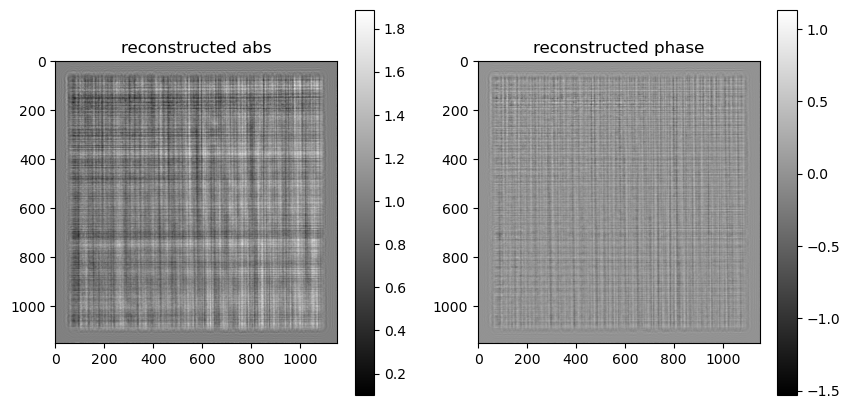
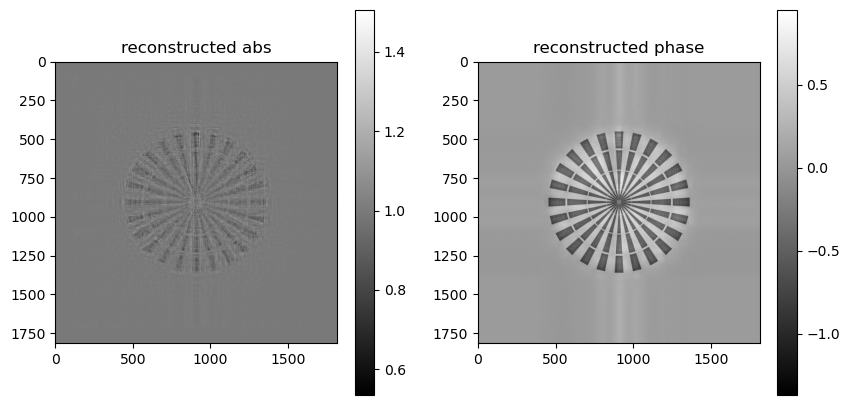
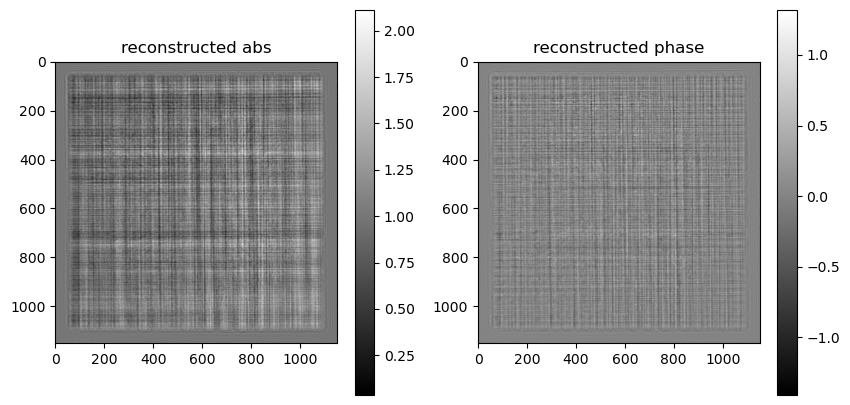
if i % pars['vis_step'] == 0:
mshow(psi[0])
mshow(prb[0])
return psi, prb, conv
# if by chunk on gpu
# rec = np.pad(recMultiPaganin, ((0, 0), (ne//2-n//2, ne//2-n//2),
# (ne//2-n//2, ne//2-n//2)), 'edge')
# rec_prb = rec_prb0.copy()
# ref = ref00.copy()
# data = data00.copy()
#if fully on gpu:
rec = cp.pad(cp.array(recMultiPaganin), ((0, 0), (ne//2-n//2, ne//2-n//2),
(ne//2-n//2, ne//2-n//2)), 'edge')
rec_prb = cp.array(rec_prb0)
ref = cp.array(ref00)
data = cp.array(data00)
pars = {'niter': 129, 'upd_psi': True, 'upd_prb': True,
'err_step': 8, 'vis_step': 32, 'gammapsi': 0.5, 'gammaprb': 0.5}
rec, rec_prb, conv = cg_holo(data, ref, rec, rec_prb, pars)
0) gammapsi=0.5 gammaprb=0.5, err=3.19738e+04
8) gammapsi=0.5 gammaprb=0.5, err=2.86512e+03
16) gammapsi=0.5 gammaprb=0.5, err=1.49764e+03
24) gammapsi=0.5 gammaprb=0.5, err=1.05401e+03
32) gammapsi=0.5 gammaprb=0.5, err=8.32919e+02
40) gammapsi=0.5 gammaprb=0.5, err=7.01328e+02
48) gammapsi=0.5 gammaprb=0.5, err=6.15396e+02
56) gammapsi=0.5 gammaprb=0.5, err=5.56971e+02
64) gammapsi=0.25 gammaprb=0.5, err=5.14104e+02
---------------------------------------------------------------------------
KeyboardInterrupt Traceback (most recent call last)
Cell In[40], line 218
214 data = cp.array(data00)
216 pars = {'niter': 257, 'upd_psi': True, 'upd_prb': True,
217 'err_step': 8, 'vis_step': 32, 'gammapsi': 0.5, 'gammaprb': 0.5}
--> 218 rec, rec_prb, conv = cg_holo(data, ref, rec, rec_prb, pars)
Cell In[40], line 197, in cg_holo(data, ref, init, init_prb, pars)
195 if i % pars['vis_step'] == 0:
196 mshow(psi[0])
--> 197 mshow(prb[0])
199 return psi, prb, conv
Cell In[35], line 11, in mshow(a)
9 axs[1].set_title('reconstructed phase')
10 fig.colorbar(im)
---> 11 plt.show()
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/pyplot.py:527, in show(*args, **kwargs)
483 """
484 Display all open figures.
485
(...)
524 explicitly there.
525 """
526 _warn_if_gui_out_of_main_thread()
--> 527 return _get_backend_mod().show(*args, **kwargs)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib_inline/backend_inline.py:90, in show(close, block)
88 try:
89 for figure_manager in Gcf.get_all_fig_managers():
---> 90 display(
91 figure_manager.canvas.figure,
92 metadata=_fetch_figure_metadata(figure_manager.canvas.figure)
93 )
94 finally:
95 show._to_draw = []
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/IPython/core/display_functions.py:298, in display(include, exclude, metadata, transient, display_id, raw, clear, *objs, **kwargs)
296 publish_display_data(data=obj, metadata=metadata, **kwargs)
297 else:
--> 298 format_dict, md_dict = format(obj, include=include, exclude=exclude)
299 if not format_dict:
300 # nothing to display (e.g. _ipython_display_ took over)
301 continue
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/IPython/core/formatters.py:182, in DisplayFormatter.format(self, obj, include, exclude)
180 md = None
181 try:
--> 182 data = formatter(obj)
183 except:
184 # FIXME: log the exception
185 raise
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/decorator.py:232, in decorate.<locals>.fun(*args, **kw)
230 if not kwsyntax:
231 args, kw = fix(args, kw, sig)
--> 232 return caller(func, *(extras + args), **kw)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/IPython/core/formatters.py:226, in catch_format_error(method, self, *args, **kwargs)
224 """show traceback on failed format call"""
225 try:
--> 226 r = method(self, *args, **kwargs)
227 except NotImplementedError:
228 # don't warn on NotImplementedErrors
229 return self._check_return(None, args[0])
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/IPython/core/formatters.py:343, in BaseFormatter.__call__(self, obj)
341 pass
342 else:
--> 343 return printer(obj)
344 # Finally look for special method names
345 method = get_real_method(obj, self.print_method)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/IPython/core/pylabtools.py:170, in print_figure(fig, fmt, bbox_inches, base64, **kwargs)
167 from matplotlib.backend_bases import FigureCanvasBase
168 FigureCanvasBase(fig)
--> 170 fig.canvas.print_figure(bytes_io, **kw)
171 data = bytes_io.getvalue()
172 if fmt == 'svg':
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/backend_bases.py:2193, in FigureCanvasBase.print_figure(self, filename, dpi, facecolor, edgecolor, orientation, format, bbox_inches, pad_inches, bbox_extra_artists, backend, **kwargs)
2189 try:
2190 # _get_renderer may change the figure dpi (as vector formats
2191 # force the figure dpi to 72), so we need to set it again here.
2192 with cbook._setattr_cm(self.figure, dpi=dpi):
-> 2193 result = print_method(
2194 filename,
2195 facecolor=facecolor,
2196 edgecolor=edgecolor,
2197 orientation=orientation,
2198 bbox_inches_restore=_bbox_inches_restore,
2199 **kwargs)
2200 finally:
2201 if bbox_inches and restore_bbox:
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/backend_bases.py:2043, in FigureCanvasBase._switch_canvas_and_return_print_method.<locals>.<lambda>(*args, **kwargs)
2039 optional_kws = { # Passed by print_figure for other renderers.
2040 "dpi", "facecolor", "edgecolor", "orientation",
2041 "bbox_inches_restore"}
2042 skip = optional_kws - {*inspect.signature(meth).parameters}
-> 2043 print_method = functools.wraps(meth)(lambda *args, **kwargs: meth(
2044 *args, **{k: v for k, v in kwargs.items() if k not in skip}))
2045 else: # Let third-parties do as they see fit.
2046 print_method = meth
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/backends/backend_agg.py:497, in FigureCanvasAgg.print_png(self, filename_or_obj, metadata, pil_kwargs)
450 def print_png(self, filename_or_obj, *, metadata=None, pil_kwargs=None):
451 """
452 Write the figure to a PNG file.
453
(...)
495 *metadata*, including the default 'Software' key.
496 """
--> 497 self._print_pil(filename_or_obj, "png", pil_kwargs, metadata)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/backends/backend_agg.py:445, in FigureCanvasAgg._print_pil(self, filename_or_obj, fmt, pil_kwargs, metadata)
440 def _print_pil(self, filename_or_obj, fmt, pil_kwargs, metadata=None):
441 """
442 Draw the canvas, then save it using `.image.imsave` (to which
443 *pil_kwargs* and *metadata* are forwarded).
444 """
--> 445 FigureCanvasAgg.draw(self)
446 mpl.image.imsave(
447 filename_or_obj, self.buffer_rgba(), format=fmt, origin="upper",
448 dpi=self.figure.dpi, metadata=metadata, pil_kwargs=pil_kwargs)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/backends/backend_agg.py:388, in FigureCanvasAgg.draw(self)
385 # Acquire a lock on the shared font cache.
386 with (self.toolbar._wait_cursor_for_draw_cm() if self.toolbar
387 else nullcontext()):
--> 388 self.figure.draw(self.renderer)
389 # A GUI class may be need to update a window using this draw, so
390 # don't forget to call the superclass.
391 super().draw()
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/artist.py:95, in _finalize_rasterization.<locals>.draw_wrapper(artist, renderer, *args, **kwargs)
93 @wraps(draw)
94 def draw_wrapper(artist, renderer, *args, **kwargs):
---> 95 result = draw(artist, renderer, *args, **kwargs)
96 if renderer._rasterizing:
97 renderer.stop_rasterizing()
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/artist.py:72, in allow_rasterization.<locals>.draw_wrapper(artist, renderer)
69 if artist.get_agg_filter() is not None:
70 renderer.start_filter()
---> 72 return draw(artist, renderer)
73 finally:
74 if artist.get_agg_filter() is not None:
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/figure.py:3154, in Figure.draw(self, renderer)
3151 # ValueError can occur when resizing a window.
3153 self.patch.draw(renderer)
-> 3154 mimage._draw_list_compositing_images(
3155 renderer, self, artists, self.suppressComposite)
3157 for sfig in self.subfigs:
3158 sfig.draw(renderer)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/image.py:132, in _draw_list_compositing_images(renderer, parent, artists, suppress_composite)
130 if not_composite or not has_images:
131 for a in artists:
--> 132 a.draw(renderer)
133 else:
134 # Composite any adjacent images together
135 image_group = []
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/artist.py:72, in allow_rasterization.<locals>.draw_wrapper(artist, renderer)
69 if artist.get_agg_filter() is not None:
70 renderer.start_filter()
---> 72 return draw(artist, renderer)
73 finally:
74 if artist.get_agg_filter() is not None:
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/axes/_base.py:3070, in _AxesBase.draw(self, renderer)
3067 if artists_rasterized:
3068 _draw_rasterized(self.figure, artists_rasterized, renderer)
-> 3070 mimage._draw_list_compositing_images(
3071 renderer, self, artists, self.figure.suppressComposite)
3073 renderer.close_group('axes')
3074 self.stale = False
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/image.py:132, in _draw_list_compositing_images(renderer, parent, artists, suppress_composite)
130 if not_composite or not has_images:
131 for a in artists:
--> 132 a.draw(renderer)
133 else:
134 # Composite any adjacent images together
135 image_group = []
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/artist.py:72, in allow_rasterization.<locals>.draw_wrapper(artist, renderer)
69 if artist.get_agg_filter() is not None:
70 renderer.start_filter()
---> 72 return draw(artist, renderer)
73 finally:
74 if artist.get_agg_filter() is not None:
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/image.py:649, in _ImageBase.draw(self, renderer, *args, **kwargs)
647 renderer.draw_image(gc, l, b, im, trans)
648 else:
--> 649 im, l, b, trans = self.make_image(
650 renderer, renderer.get_image_magnification())
651 if im is not None:
652 renderer.draw_image(gc, l, b, im)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/image.py:939, in AxesImage.make_image(self, renderer, magnification, unsampled)
936 transformed_bbox = TransformedBbox(bbox, trans)
937 clip = ((self.get_clip_box() or self.axes.bbox) if self.get_clip_on()
938 else self.figure.bbox)
--> 939 return self._make_image(self._A, bbox, transformed_bbox, clip,
940 magnification, unsampled=unsampled)
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/image.py:526, in _ImageBase._make_image(self, A, in_bbox, out_bbox, clip_bbox, magnification, unsampled, round_to_pixel_border)
521 mask = (np.where(A.mask, np.float32(np.nan), np.float32(1))
522 if A.mask.shape == A.shape # nontrivial mask
523 else np.ones_like(A, np.float32))
524 # we always have to interpolate the mask to account for
525 # non-affine transformations
--> 526 out_alpha = _resample(self, mask, out_shape, t, resample=True)
527 del mask # Make sure we don't use mask anymore!
528 # Agg updates out_alpha in place. If the pixel has no image
529 # data it will not be updated (and still be 0 as we initialized
530 # it), if input data that would go into that output pixel than
531 # it will be `nan`, if all the input data for a pixel is good
532 # it will be 1, and if there is _some_ good data in that output
533 # pixel it will be between [0, 1] (such as a rotated image).
File ~/conda/miniforge3/envs/holotomocupy/lib/python3.12/site-packages/matplotlib/image.py:208, in _resample(image_obj, data, out_shape, transform, resample, alpha)
206 if resample is None:
207 resample = image_obj.get_resample()
--> 208 _image.resample(data, out, transform,
209 _interpd_[interpolation],
210 resample,
211 alpha,
212 image_obj.get_filternorm(),
213 image_obj.get_filterrad())
214 return out
KeyboardInterrupt:
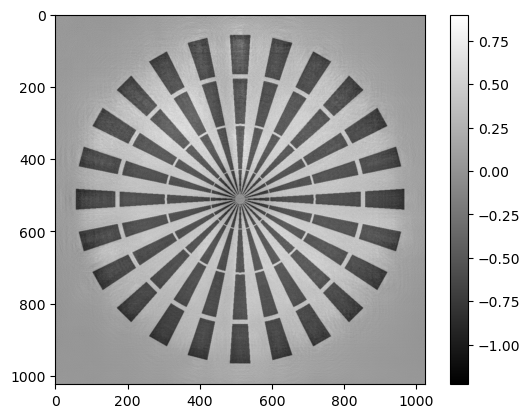
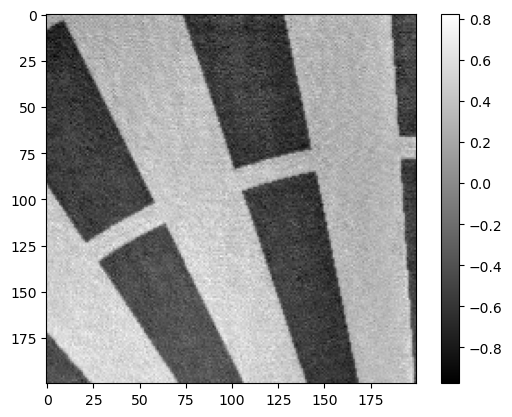
[ ]:
plt.imshow(cp.angle(rec[0,ne//2-n//2:ne//2+n//2,ne//2-n//2:ne//2+n//2]).get(), cmap='gray')
plt.colorbar()
plt.show()
plt.imshow(cp.angle(rec[0,ne//2-n//2+100:ne//2-n//2+300,ne//2-n//2+300:ne//2-n//2+500]).get(), cmap='gray')
plt.colorbar()
plt.show()